Menyelusuri teknologi di dalam kenderaan swa-pandu masa hadapan. Bersediakan kita menghadapinya?
Kenderaan swa-pandu mempunyai potensi yang besar untuk merevolusikan bidang pengangkutan dan logistik. Apabila disebut revolusi, ia bermaksud semuanya akan dilakukan secara berbeza berbanding norma kebiasaan kenderaan biasa. Kenderaan ini mempunyai ciri yang rumit dan canggih yang membolehkan kenderaan ini bergerak sendiri tanpa bantuan pemandu dari satu tempat ke satu tempat.
Terdapat lima tahap teknologi kenderaan mengikut piawaian SAE. Pada tahap kosong ini adalah tahap yang sepenuhnya dikawal oleh kenderaan manual manusia tanpa bantuan komputer. Ini adalah kereta-kereta keluarga kita kampung – seperti kereta Proton Wira, Kancil yang menggunakan teknologi lama.
Tahap teknologi kenderaan swa-pandu
Pada tahap satu, kenderaan ini mempunyai sistem komputer yang berperanan membantu pemandu seperti kawalan minyak dan stering. Ini bertujuan untuk menambahkan kecekapan penggunaan minyak dan kestabilan kereta.
Tahap kedua pula merupakan tahap yang kebanyakan ada pada kereta moden hari ini seperti yang ada di Proton X50. Sistem komputer boleh berfungsi untuk mengawal stering dan pedal minyak serta brek jika terdapat perubahan persekitaran yang dikesan oleh sensor-sensor di dalam kereta.
Pada tahap ketiga ini adalah merupakan tahap yang boleh dikatakan bermulanya era kenderaan swa-pandu. Kereta pada tahap ini boleh dipandu dengan sendirinya. Namun, berdasarkan piawaian SAE, di tahap ini pemandu mestilah pada bila-bila masa mengambil alih kenderaan jika sistem komputer mengarahkannya. Pendek kata, walaupun kenderaan boleh bergerak sendiri, pemandu mestilah sentiasa peka dengan status kereta. Anda tidak boleh membuat kerja lain semasa di dalam kereta iaitu seperti bermain telefon!
Jadi, apakah fungsi tahap ketiga jika pemandu masih perlu peka dengan kenderaan sepanjang masa? Inilah yang difikirkan oleh kebanyakan syarikat kenderaan swa-pandu seperti Tesla dan beberapa syarikat lain. Kebanyakan syarikat telah melangkau terus tahap ketiga dengan terus ke tahap keempat SAE.
Pada tahap keempat pula kenderaan boleh dipandu oleh komputer sendiri tanpa memerlukan manusia mengambil alih di dalam persekitaran yang telah ditentu uji oleh pengeluar kenderaan tersebut. Pendek kata, jika kenderaan tersebut telah diuji di kawasan Putrajaya, kenderaan tersebut boleh dikatakan boleh berfungsi sepenuhnya tanpa pemandu. Walau bagaimanapun, bagi persekitaran yang dinamik dan kompleks, kenderaan tahap empat ini masih memerlukan beberapa maklumat daripada pemandu; atau tidak boleh berfungsi pada persekiran baharu yang belum dipandu uji atau disahkan.
Tahap tertinggi di dalam teknologi swa-pandu adalah tahap kelima. Ini merupakan tahap yang paling canggih iatu tiada bantuan manusia diperlukan pada tahap ini. Teknologi 5G juga boleh mempercepatkan teknologi swa-pandu boleh berada pada tahap kelima.
Sebagai contoh, data-data baharu persekitaran yang dibaca oleh sensor kereta swa-pandu akan dihantar ke pelayan untuk dilatih menggunakan teknologi pembelajaran mesin yang menjadikan kereta swa-pandu ini boleh diadaptasi pada persekitaran berbeza. Di samping itu, sistem insfrastruktur juga boleh berkomunikasi dengan kereta tersebut untuk memberikan maklumat berguna kepada kereta swa-pandu supaya proses pemanduan berjalan dengan lancar.
Teknologi sensor di dalam kenderaan swa-pandu
Kenderaan swa-pandu bergantung sepenuhnya kepada sensor-sensor canggih di dalam kenderaan tersebut. Sensor-sensor ini akan diproses untuk menjalani algorithm yang kompleks seperti pembelajaran mesin, sistem kawalan dan kod-kod program khas untuk kereta tersebut.
Apabila kita ingin analogikan dengan cara manusia bergerak. Semasa kita masih bayi, kita akan mula belajar berjalan secara perlahan-lahan. Mata, telinga dan bahagian badan lain digunakan oleh otak kita untuk memproses maklumat. Secara perlahan-lahan otak kita akan dapat mempelajari bagaimana untuk berjalan secara yang betul sehinggalah kita dapat berjalan dengan sempurna seperti hari ini. Proses seperti inilah yang dipanggil teknologi pembelajaran mesin di dalam kenderaan swa-pandu.
Selain itu, sensor-sensor yang terdapat di dalam kenderaan ini seperti Light Detection and Ranging (LIDAR), kamera, radar, odometer, Inertial Measurement Unit (IMU) akan digunakan bagi proses pemetaan persekitaran. Setiap sensor di dalam kenderaan swa-pandu mempunyai maklumat persekitaran di dalam format data yang berbeza.
Format-format data ini akan digabungkan untuk memberi satu maklumat yang tepat berkenaan keberadaan kenderaan pada sesuatu lokasi. Proses mengabungkan maklumat ini dipanggil sensor fusion di dalam teknologi swa-pandu ini. Proses pemetaan untuk mendapatkan peta pula dipanggil SLAM (Simultaneous Localisation and Mapping) manakala proses mendapatkan lokasi yang tepat kenderaan tersebut dipanggil Localisation. Kemudian, proses merancang dan menggerakkan kenderaan swa-pandu akan dilakukan berdasarkan maklumat-maklumat pemetaan tersebut. Proses ini dipanggil Planning and Control di dalam bidang teknologi swa-pandu.
Setiap proses di dalam teknologi ini adalah rumit dan memerlukan jangka masa yang lama untuk mendalaminya. Malah anda mungkin mendapat segulung ijazah PhD jikalau anda mendalami salah satu di dalam bidang teknologi swa-pandu ini!
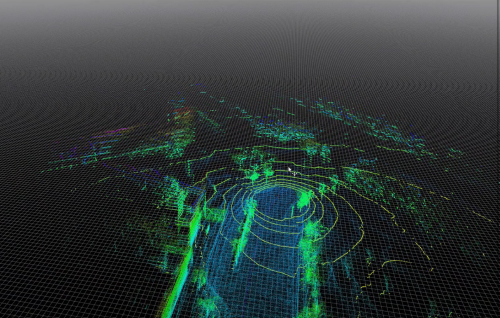
Sebagai contoh, imej daripada camera kenderaan swa-pandu akan digabungkan dengan imej daripada LIDAR (rujuk Rajah 1) yang menggunakan teknologi laser. Kedua-dua data ini akan digabungkan untuk mendapatkan ciri-ciri persekitaran. Sebagai contoh, di hadapan kereta terdapat bangunan, pokok atau objek dan manusia yang sedang bergerak. Kereta ini akan dilatih dengan teknik pembelajaran mesin untuk mengenali ciri-ciri persekitaran. Teknik ini memerlukan data persekitaran yang besar untuk memandaikan kereta swa-pandu. Jadi, tidak hairanlah para penyelidik di dunia sering berkongsi data mereka untuk melatih kereta mereka supaya lebih pintar dari hari ke hari. Ini merupakan satu contoh teknologi yang canggih di dalam kereta ini.
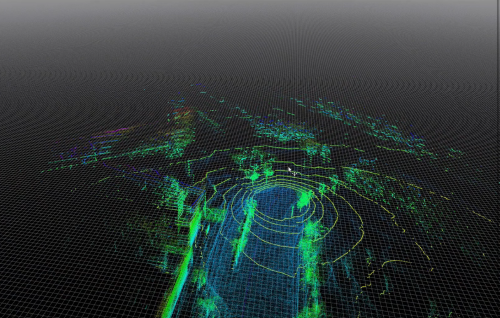
Rajah 1: Contoh pemetaan LIDAR di Universiti Malaysia Pahang
Cabaran teknologi kereta swa-pandu
Teknologi kereta swa-pandu pada tahap lima masih di dalam makmal-makmal penyelidikan penyelidik seluruh dunia. Beberapa konsep telah dipandu uji di jalan raya di beberapa buah negara tetapi boleh dikatakan tiada lagi yang betul-betul berada untuk kegunaan umum.
Teknologi sensor yang sangat mahal dan belum stabil sepenuhnya
Kos sensor seperi LIDAR dan radar adalah sangat mahal untuk dihasilkan. Ini sedikit sebanyak membantutkan pembangunan kereta swa-pandu untuk kegunaan yang lebih besar. Antara isu yang masih belum diuji secara mendalam adalah bagaimana sensor seperti LIDAR ini berfungsi apabila berada di atas jalan raya yang terdapat semua kereta dengan LIDAR di atasnya.
LIDAR adalah sensor yang menggunakan konsep pantulan cahaya laser bagi mendapatkan jarak dan sudut dengan objek yang dipancarkannya. Jika pemanduan swa-pandu sebelum ini hanya menggunakan persekitaran satu kereta swa-pandu di dalam lautan kereta konvensional, bagaimana pula jika kereta swa-pandu berada di dalam kawasan kereta swa-pandu yang lain? Adakah akan terdapat gangguan rangkaian signal seperti maklumat sensor dihantar kepada kereta yang salah yang akan menyebabkan kesalahan kiraan di dalam sistem komputer yang boleh membahayakan semua orang.
Cuaca yang tidak boleh dijangka
Seperti sedia maklum, sensor di dalam kenderaan swa-pandu adalah diperlukan untuk membolehkan kereta ini mengadaptasi dengan persekitaran yang berbeza. Walau bagaimanapun, pada keadaan cuaca yang ekstrem, sensor-sensor ini tidak dapat berfungsi pada keadaan yang optimum dan berpotensi untuk gagal. Sebagai contoh, Malaysia mempunyai taburan hujan yang amat tinggi berbanding negara lain. Jika di negara-negara Eropah, penyelidik menguji kereta pada keadaan salji yang amat tebal untuk memaksimakan kebolehpercayaan teknologi swa-pandu. Walau bagaimanapun, terdapat sedikit sahaja penyelidikan berkisarkan keadaan sensor di Malaysia yang mempunyai musim monsun hujan yang lebat dan banjir. Jikalau ia tidak diuji untuk cuaca sebegini bagaimana untuk kita pastikan sistem ini dapat berfungsi dengan lancar?
Isu etika dan moral
Ini merupakan suatu isu yang masih belum selesai di dalam komuniti penyelidik kereta swa-pandu. Sebagai contoh, seorang pengaturcara komputer memprogramkan kereta tersebut untuk keselamatan kereta dan pemandu di dalamnya. Terdapat dua kes yang masih menjadi perdebatan dalam kalangan penyelidik:
Jika kereta swa-pandu berada pada situasi kritikal dan hampir berlaku perlanggaran antara orang awam yang ramai dan kereta ini perlu mengelak. Apakah yang pengaturcara komputer perlu programkan kepada kereta ini?
Situasi 1: Pengaturcara perlu memprogramkan kereta ini supaya menyelamatkan orang awam yang ramai pada masa yang sama merisikokan keselamatan penumpang kereta swa-pandu. Ini bermaksud kereta swa-pandu perlu diubah haluan daripada melanggar manusia dan berpotensi melanggar benda yang lebih berbahaya.
Situasi 2: Program komputer mesti melindungi penumpang di dalam kereta. Jadi untuk kes ini, orang awam akan dikorbankan untuk dilanggar walaupun ramai orang pada waktu tersebut. Di dalam situasi ini penumpang kereta diutamakan keselamatannya.
Untuk situasi 1, program komputer seperti ini akan mendapat pujian orang awam kerana memprioritikan keselamatan mereka. Namun, pada masa yang sama pengguna kereta swa-pandu akan merasakan diri mereka tidak selamat dan terancam disebabkan prioriti kereta bukan untuk melindungi keselamatan mereka. Adakah anda ingin berada di dalam sebuah robot yang anda tahu tidak mahu melindungi anda jika berlaku situasi berbahaya seperti ini? Sudahlah kos memiliki kereta ini sangat mahal namun tidak mahu melindungi anda pula.
Untuk situasi 2, iaitu melindungi penumpang kereta. Di sini isu moral berlaku; adakah orang yang kaya dan mampu memiliki kereta swa-pandu yang mahal lebih berhak untuk hidup berbanding orang awam? Atas dasar apa pengaturcara program komputer boleh memilih nyawa siapa untuk dikorbankan?
Berdasarkan situasi ini, kita dapat simpulkan isu moral dan etika bukanlah isu mudah seperti kod binari di dalam program komputer yang hanya ada 0 atau 1. Pihak insurans juga pening untuk memikirkan siapa yang akan bertanggungjawab jika berlaku kemalangan. Adakah pemilik kenderaan, pembekal perisian pintar, syarikat kereta atau insfrastruktur yang perlu dipertanggungjawabkan jika berlaku sesuatu isu?
Ia seperti kes yang berlaku di China baru-baru ini apabila kereta swa-pandu mengalami kemalangan. Syarikat kereta swa-pandu menyalahkan pemilik kenderaan kerana tidak mengikut arahan operasi pemanduan kereta manakala pemilik kenderaan swa-pandu mengatakan perisian kereta mereka tidak berfungsi seperti yang diharapkan.
Undang-undang berbeza setiap negara
Undang-undang yang berbeza setiap negara juga merencatkan proses pembangunan dan adaptasi kereta swa-pandu. Sebagai contoh terdapat negara di Eropah yang tidak membenarkan pengunaan kamera sensor untuk kereta swa-pandu atas faktor keselamatan dan privasi.
Limitasi undang-undang akan memberikan kesan kepada jenis teknologi yang boleh diadaptasi di setiap negara. Sebagai contoh, negara yang tidak boleh menggunakan kamera sensor bagi teknologi kereta akan menyebabkan kereta swa-pandu akan kurang faktor keselamatan.
Isu keselamatan nasional juga memainkan peranan. Kebiasanyaan, data-data dari kereta akan dimuat naik kepada pelayan-pelayan syarikat kenderaan untuk tujuan kemas kini perisian. Data-data yang dimuat naik ini akan mengandungi maklumat imej, lokasi, bentuk muka bumi, jenis-jenis jalan. Data-data ini boleh diambil dengan mudah melalui kawasan-kawasan yang kereta ini telah lalui.
Bayangkan apabila semua data-data ini dari kenderaan berbeza digabungkan. Syarikat kenderaan ini akan mendapat satu data yang cukup lengkap berkenaan landskap sesuatu negara dan boleh menjejaskan kedaulatan sesebuah negara. Oleh kerana inilah terdapat negara yang tidak membenarkan benda ini berlaku.
Kesimpulannnya, teknologi kereta swa-pandu pasti akan datang kepada kita, cepat atau lambat. Persoalannya bersediakah kita menghadapinya? Apakah persiapan yang perlu kita lakukan untuk bersedia supaya negara kita tidak ketinggalan di dalam teknologi ini?
Persediaan dari segenap aras masyarakat perlu dibuat sekarang daripada peringkat sekolah sehinggalah ke peringkat tertinggi. Kita tidak mahu negara kita ketinggalan dan menjadi pengguna bagi teknologi negara-negara maju sahaja.
Saya akhiri penulisan ini dengan peringatan untuk kita membangunkan teknologi kita sendiri untuk negara kita yang tercinta ini. Jika kita sendiri tidak membangunkan negara kita, siapa lagi akan buat?

Penulis ialah Pensyarah Kanan di Fakulti Teknologi Kejuruteraan Pembuatan dan Mekatronik (FTKPM) dan merupakan felo penyelidik di makmal Autonomous Vehicle, Pusat Kejuruteraan Automotif, Universiti Malaysia Pahang (UMP). Beliau juga merupakan penyelidik yang aktif di dalam pembangunan teknologi kereta swa-pandu semenjak tahun 2010 di Malaysia dan telah menghasil banyak penerbitan berkenaan teknologi ini.
Disediakan Oleh: Dr. Muhammad Aizzat Zakaria
e-mel: maizzat@ump.edu.my
- 1321 views